![Denny Darlis [DYD]](https://dennydarlis.staff.telkomuniversity.ac.id/files/2015/01/cropped-draftPIN5.jpg)
Pendahuluan
Sensor ultrasonik bekerja dengan prinsip sistem SONAR dan RADAR yang digunakan untuk menentukan jarak sebuah obyek.
Spesifikasi Modul HCSR04:
- Tegangan kerja: 5V DC
- Arus kerja: 15mA
- Jangkauan Maksimum: 4 m
- Jangkauan Minimum: 2 cm
- Sudut pengukuran: 15 derajat
- Sinyal masukan pemicu: pulsa TTL 10 us
- Resolusi: 1 cm
- Frekuensi Ultrasonik: 40 kHz
- Dimensi: 45 * 20 * 15 mm

Sensor ultrasonik membangkitkan gelombang suara frekuensi-tinggi (ultrasound). Ketika ultrasound menumbuk sebuah obyek, maka gelombang tersebut akan terpantul dalam bentuk gaung (echo) yang kemudian dirasakan oleh penerima seperti yang ditunjukkan pada Gambar di bawah ini.
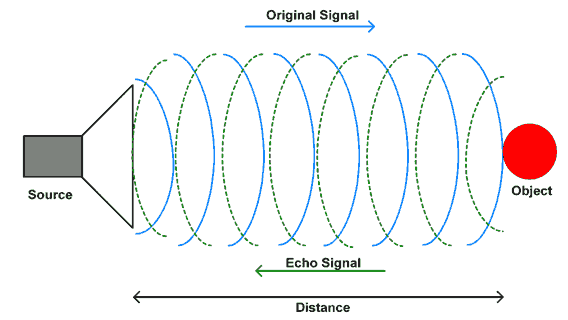
Dengan mengukur waktu yang diperlukan gaung dalam mencapai penerima, kita bisa menghitung jaraknya. Hal ini adalah dasar prinsip kerja modul Ultrasonik untuk mengukur jarak.
Modul Ultrasonik HC-SR04

Komponen utama modul HC-SR04:
- STC11F (single-chip microcontroller, based on 1T architecture 80C51 CPU)
- MAX232 (dual EIA-232 driver/receiver)
- TL074 (low-noise JFET-input operational amplifier)
- 40-KHz ultrasonic transmitter and receiver pair (40T/R-B/W)
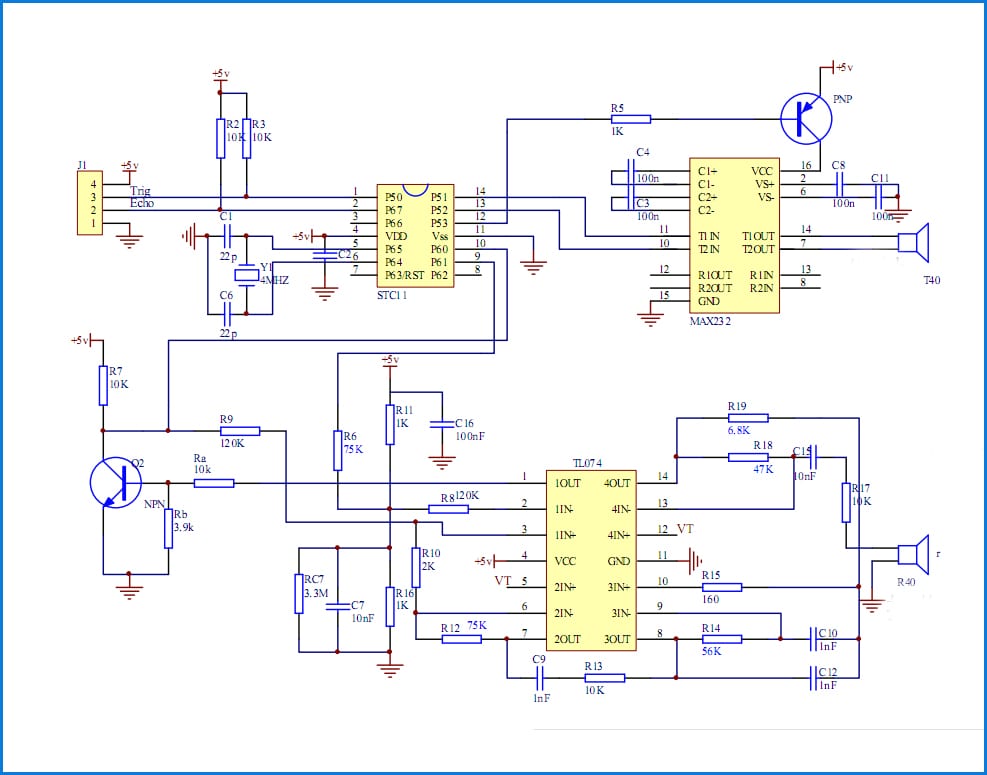
HC-SR04 memiliki sebuah pengirim, penerima dan rangkaian pengendali ultrasonik.
Pada modul ultrasonik HC-SR04, kita harus memberikan pulsa pemicu (trigger), sehingga modul ini akan membangkitkan ultrasound dengan frekuensi 40 kHz. Setelah membangkitkan ultrasound yakni 8 pulsa 40kHz, modul ini akan membuat pin echo berlogika tinggi (high). Pin echo akan tetap tinggi sampai dengan tidak ada lagi gaung balik yang diterima. Sehingga lebar pulsa pin echo akan menjadi waktu yang dibutuhkan suara untuk sampai ke obyek dan balik lagi. Begitu kita mendapatkan waktunya kita bisa menghitung jarak, begitu kita mengetahui kecepatan suara.
HC-SR04 bisa mengukur jangkauan dari 2 cm hingga 400 cm.
Deskripsi Pin HC-SR04

VCC – catu daya +5 V
TRIG – masukan pemicu (Trigger) untuk sensor. Mikrokontroler perlu memberikan pulsa trigger selama 10 us ke modul ultrasonik HC-SR04.
ECHO – Keluaran Echo dari sensor. Mikrokontroler akan membaca/memantau pin ini untuk mendeteksi halangan atau mencari jarak.
GND – Ground
Prinsip Kerja HC-SR04
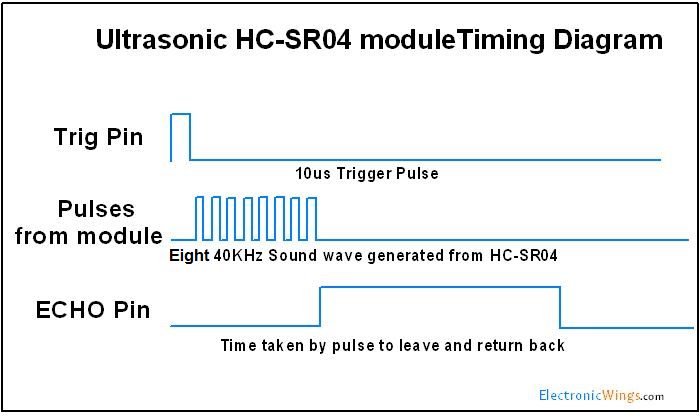
- Kita perlu mengirimkan pulsa pemicu paling sedikit 10 us ke pin Trig HC-SR04.
- Kemudian secara otomatis HC-SR04 mengirimkan Delapan gelombang suara 40 kHz dan menunggu keluaran sisi naik di pin Echo.
- Apabila pengambilan sisi naik muncul di pin Echo, kita mulai Timer dan menunggu sisi turun di pin Echo.
- Begitu sisi turun diambil dari pin Echo, kita baca hitungan Timer. Perhitungan waktu ini merupakan waktu yang dibutuhkan sensor untuk mendeteksi sebuah obyek dan kembali dari obyek tersebut.
Sekarang bagaimana caranya menghitung jarak?
Kita ketahui bahwa,
Jarak = Kecepatan x Waktu
Kecepatan gelombang suara adalah 343 m/dtk.
Sehingga,
Jarak Total = (343 x Waktu Pulsa Tinggi (Echo)) / 2
Jarak totalnya dibagi 2 karena sinyalnya merambat dari HC-SR04 ke obyek dan kembali lagi ke modul HC-SR04.DatasheetDownload